论文资料
Pyramid Scene Parsing Network主页
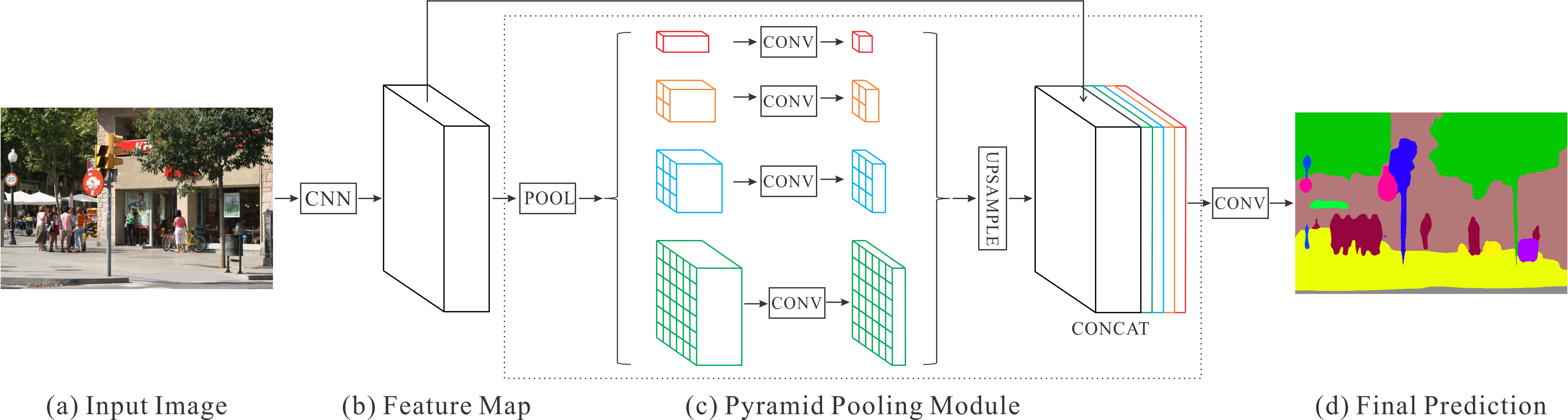
网络结构
结果示例

代码实现
pspnet pytorch实现的pspnet,同时提供了PASCAL VOC 2012和BRATS 2017数据集上训练的权值文件。
PSPNet-TF-Reproduce PSPNet的tensorflow实现。
代码分析
import torch
from torch import nn
from torch.nn import functional as F
import extractors
class PSPModule(nn.Module):
def __init__(self, features, out_features=1024, sizes=(1, 2, 3, 6)):
super().__init__()
# PSP池化模块,尺度为1,2,3,6分别为分辨率降低1,2,3,6
self.stages = []
self.stages = nn.ModuleList([self._make_stage(features, size) for size in sizes])
# 将concat所有的特征层,包括4种尺度的PSP以及原先的输入
self.bottleneck = nn.Conv2d(features * (len(sizes) + 1), out_features, kernel_size=1)
self.relu = nn.ReLU()
def _make_stage(self, features, size):
prior = nn.AdaptiveAvgPool2d(output_size=(size, size))
conv = nn.Conv2d(features, features, kernel_size=1, bias=False)
return nn.Sequential(prior, conv)
def forward(self, feats):
# 输入的特征层为BxCxHxW
h, w = feats.size(2), feats.size(3)
# 在PSP池化模块concat前首先使用双线性插值的方法上采样为原先的尺度
priors = [F.upsample(input=stage(feats), size=(h, w), mode='bilinear') for stage in self.stages] + [feats]
bottle = self.bottleneck(torch.cat(priors, 1))
return self.relu(bottle)
class PSPUpsample(nn.Module):
def __init__(self, in_channels, out_channels):
super().__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 3, padding=1),
nn.BatchNorm2d(out_channels),
nn.PReLU()
)
def forward(self, x):
h, w = 2 * x.size(2), 2 * x.size(3)
# 卷积上采样层2x并且使用一个1x的conv
p = F.upsample(input=x, size=(h, w), mode='bilinear')
return self.conv(p)
class PSPNet(nn.Module):
def __init__(self, n_classes=18, sizes=(1, 2, 3, 6), psp_size=2048, deep_features_size=1024, backend='resnet34',
pretrained=True):
super().__init__()
# PSPNet前端特征提取模块
self.feats = getattr(extractors, backend)(pretrained)
# 默认的psp_size为2048是因为resnet的特征层为2048
self.psp = PSPModule(psp_size, 1024, sizes)
self.drop_1 = nn.Dropout2d(p=0.3)
# 原文中直接使用8x的上采样,该实现中使用3个2x的上采样循序渐进
self.up_1 = PSPUpsample(1024, 256)
self.up_2 = PSPUpsample(256, 64)
self.up_3 = PSPUpsample(64, 64)
self.drop_2 = nn.Dropout2d(p=0.15)
# 最后一层将64层的特征层转换为n_classes的pixel label map
self.final = nn.Sequential(
nn.Conv2d(64, n_classes, kernel_size=1),
nn.LogSoftmax()
)
self.classifier = nn.Sequential(
nn.Linear(deep_features_size, 256),
nn.ReLU(),
nn.Linear(256, n_classes)
)
def forward(self, x):
# 或得resnet的第四层特征和第三层特征
f, class_f = self.feats(x)
p = self.psp(f)
p = self.drop_1(p)
p = self.up_1(p)
p = self.drop_2(p)
p = self.up_2(p)
p = self.drop_2(p)
p = self.up_3(p)
p = self.drop_2(p)
# 第三层特征作为辅助信息,其输出维度为1024,即deep_features_size,将class_f池化为BxCx1x1然后reshape为BxC
auxiliary = F.adaptive_max_pool2d(input=class_f, output_size=(1, 1)).view(-1, class_f.size(1))
# 返回的是feature map的Bx[n_classes]xHxW以及辅助的class信息Bx[n_classes]
return self.final(p), self.classifier(auxiliary)